
Космический робот - FIDO Rover
FIDO Rover (Field Integrated Design and Operations) - роботизированный вездеход, опытный образец для будущих полетов на Марс, запланированных NASA. Этот вездеход успешно прошел все испытания согласно программе технологий исследования Марса. Ранее, подобные аппараты использовались в программе NASA Mars Exploration Rovers (MER), которая стартовала в 2003 году.

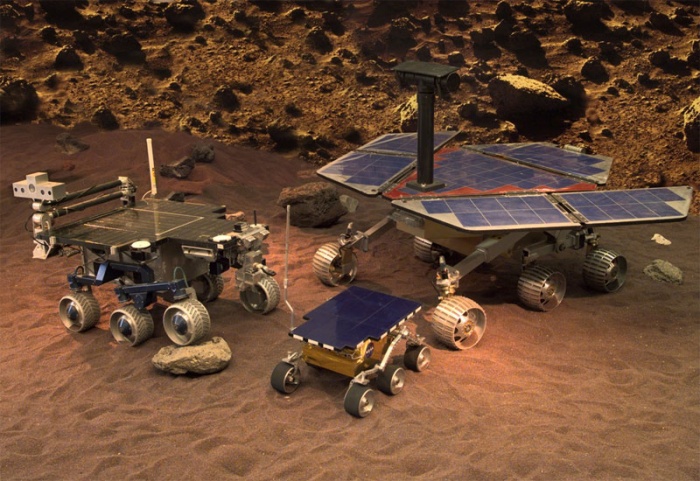
FIDO Rover по функциям и возможностям подобен Mars Exploration Rovers (MER, исследовательские вездеходы Марса), при этом вездеходы MER являются приблизительно в 1.5 раза больше и в 2.5 раза массивнее. Вездеходы оснащены солнечными панелями и бортовыми батареями для энергетического питания. С точки зрения системы управления присутствуют тонкие функциональные различия в системах, отвечающих за перемещение вездехода, мобильность, навигацию и контроль. Оба проекта используют 6-колесную платформа и имеют одинаковую систему управления двигателем и систему астронавигации.
Есть также небольшие различия в робототехнических механизмах, а наиболее очевидное различие - в мачте системы стерео отображения поверхности ландшафта и инфракрасного спектрометра для измерения минерального состава грунта. И наконец, установленная наверху роботизированная рука с пятью степенями свободы отличается по внешнему виду, но схожа в функциональности с MER rover Instrument Deployment Device (IDD), которое контролирует позицию, азимут и высоту четырех встроенных в руку инструментов.

FIDO Rover прошел 4 полевых испытания, включая тесты в Silver Lake, Калифорния (1999); Black Rock Summit, Невада (2000); Soda Mountains, Калифорния (2001); и Grey Mountain, Аризона (2002).