Использование роботов при диагностике зданий

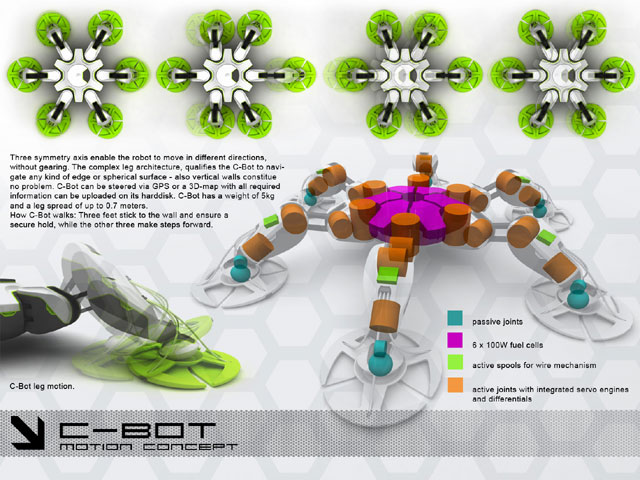
Niklas Galler разработал в 2007 году специализированного робота-скалолаза С-Bot, который использует принципы сцепления с поверхностью, схожие с теми, которые применяют в природе гекконы. Инновационный бионический материал имитирует структуру кожи лап геккона. Этот материал с наноструктурой не нуждается в энергии извне и имеет мощную способность к прилипанию благодаря силам Ван-дер Ваальса.
Робот С-Bot автономно взбирается по внешней стороне зданий и диагностирует их структуру, анализируя отраженный ультразвук с помощью встроенных сенсоров. На основании полученных в ходе диагностики данных в конкретных местах могут проводиться выборочные ремонтные мероприятия. Таким образом, необходимость в сооружении строительных подмостков уходит в прошлое. Это ведет к значительному снижению стоимости таких работ и упрощению самой процедуры диагностики и ремонта сооружений.