Атмосферный робот от JPL

Jet Propulsion Laboratory разрабатывает автономный технологический аэробот (воздухоплавательный робот), предназначенный для исследования планет солнечной системы, на которых присутствует атмосфера. Несмотря на то что основная цель исследования - Титан (спутник Сатурна), аэробот может быть применим для атмосферы Венеры или Земли. Автономные технологии включают следующие направления развития:
- "Система безопасности полета" - гарантирует безопасность и целостность аэробота, на протяжении всего времени полета, даже в случае временного нарушения связи;
- Стабильное и точное автономное управление полетом, включая развертывание/старт, длительный полет, поддержание стационарной орбиты, и осуществление выбора поверхности приземления с отказом и уходом на второй круг;
- Пространственное отображение и определение своей позиции на географической карте;
- Обнаружение опасности и целевое распознавание, прослеживание и сервоуправление, позволяет аэроботу обнаружить и избежать атмосферных и топографических опасностей, а также идентифицировать объект и держать направление, приспосабливаясь к особенностям ландшафта.
На данный момент все эти исследования проводятся на опытном образце аэробота и находятся уже в процессе отладки.
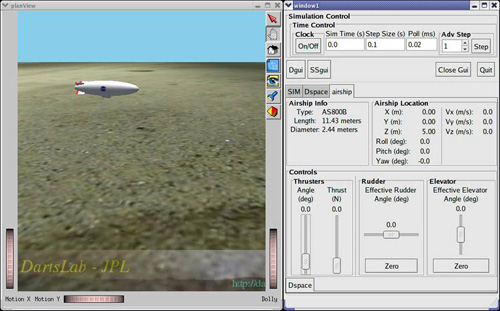
Спецификация:
- длина 11 м.
- диаметр 2.5 м., полный объем 34 m3.
- два 2.3 кВт (3 высоких давления) 23 cm3 (1.4 дюйма cu) снабжают топливом двигатели.
- двойно-цепная приостановка гондолы.
- максимальная скорость 13 м\с (25 kts) в "X" конфигурации.
- полезная статическая нагрузка подъема 12-килограммового ASL.
- полезная динамическая нагрузка подъема 16-килограммового ASL.

Бортовое радиоэлектронное оборудование и системы связи установлены в гондоле.
Система бортового радиоэлектронного оборудования имеет компьютерную архитектуру двойного стека. Один из стеков используется для навигации и управления полетом, в то время как другой посвящен обработке изображения. Беспроводные радиомодемы обеспечивают связь по передаче данных между аэроботом и наземной станцией, а также камеры наблюдения передают видеоизображение. В то же время, в случае непредвиденных ситуаций человек может взять под свой контроль систему управления аэробота.
Доступные навигационные сенсоры состоят из IMU (угловая скорость, линейное ускорение), компас/уклономер (поиск, крен, тангаж, углы), лазерный высотомер (относительная высота от поверхности), барометрический высотомер (абсолютная высота относительно контрольной точки), и GPS (абсолютное трехмерное положение).
Датчики системы технического зрения включают две навигационных камеры, которая обеспечивает широкий 360x180 угол обзора, в то время как другая узконаправленная.
Наземная станция состоит из портативного компьютера, интерфейса пользователя для наблюдения за аппаратом, видео связи, видео мониторов и отдельной GPS (DGPS), которая определяет трехмерное положение аэробота с точностью до сантиметров.