
Проект сверхзвуковой подводной лодки
Опубликовано 6 сентября, 2014 - 23:36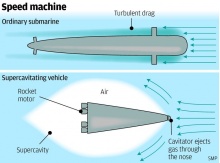
Новая технология, разрабатываемая учеными Харбинского технологического института, позволит создать сверхзвуковую подводную лодку, скорость которой может достигать 5800 км/час. Фактически такая субмарина сможет пересечь Тихий океан менее чем за два часа. Технология базируется на известном принципе суперкавитации – создание воздушной прослойки вокруг объекта, погруженного в жидкость, что позволяет преодолеть сопротивление воды.
В свое время советскими военными экспертами была разработана суперкавитационная торпеда "Шквал", которая могла развивать скорость более 370 километров в час, что намного быстрее обычных торпед. Однако данная технология обладала рядом существенных недостатков. Во-первых, такие подводные судна должны были запускаться с достаточно высоких скоростей - около 100 километров в час, для того, чтобы вокруг них сформировалась воздушная оболочка. Во-вторых, такими судами было практически невозможно управлять, так как рулевые механизмы, находящиеся внутри "пузыря", не могли контактировать с водой.



